机器人创新实验报告

西华大学实验报告
实 验 报 告
(理工类)
课 程 名 称:
课 程 代 码:
学院(直属系): 年级/专业/班: 学 生 姓 名: 学 号: 实验总成绩: 任 课 教 师: 开 课 学 院:
实验中心名称:
一、 设计题目:
1

西华大学实验报告
二、 成员分工:(5分)
姓名
三、 设计方案:(整个系统工作原理和设计)(20分)
学号 班级 任务分配
2
西华大学实验报告
四、 实验步骤:(图文说明设计过程中关键步骤)(30分)
3
西华大学实验报告
4
西华大学实验报告
五、 最终作品展示:(图片及性能描述)(20分)
六、 设计心得:(10分)
七、 对本课程建议或意见:(选作题)
5
西华大学实验报告 附录:(设计文件、工程图、代码等)(15分)
6
第二篇:创新型实验报告
实 践 报 告题 目: 线性规划与整数规划
Matlab编程与应用举例
指导教师:王凯
学 院:理学院
专 业:数学与应用数学
组 员:张 超 0907010283 152xxxxxxxx 彭 勇 0907010167 152xxxxxxxx 龙昭昌 0907010262 152xxxxxxxx 张永勇 0907010264 152xxxxxxxx 梁 鹏 0907010273 152xxxxxxxx
分 工:彭勇资料收集;梁鹏、张永勇上网、查阅
相关书籍;龙昭昌、张超论文整合,编写
20xx年7月12号

一、问题描述及分析
问题描述:某厂每日八小时的产量不低于1800件。为了在进行质量控制,计划聘请两种不同水平的检验员。一级检验员的标准为:速度25件/小时,正确率98%,计时工资4元/小时;二级检验员的标准为:速度15件/小时,正确率95%,计时工资3元/小时。检验员每错检一次,工厂要损失2元。现有可供厂方聘请的检验员人数为一级8人和二级10人,伪是总检验费用最省,该工厂应聘请一级、二级检验员各多少名?
问题分析:由问题描述中我们可知,要使总检验费用最省,主要与聘请一级、二级检验员的数目有关,在单向对于一级或二级检验员时,总费用随它们成正比。不过它们可以相互谐调,各自有增有减。况且我们知道该工厂每日的产量不低于1800件,并且由于一级、二级检验员的水平有所差异,我们也得从他的检验速度及正确率对他们进行评估,即一个人对该公司的价值。这样我们就可以得到它们的从有选择,不过一级、二级检验员的人数有限,因此还得控人考虑。
二、原理与方法
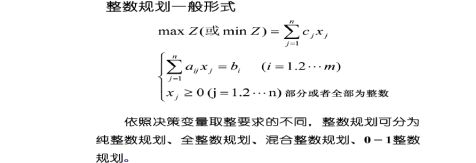
整数规划
整数规划是规划论中近30年才发展起来一个重要分支。 主要是由于经济管理中的大量问题抽象为模型时,人们发现许
多量具有不可分割性,因此当它们被作为变量引入到规划中时 ,常要求满足取整条件。如生产计划中,生产机器多少台(整 数);运输问题中 ;人力资源管理中,招聘员工多少人(整数)
,从一个港口到另一个港口的集装箱调运数量(整数);另外, 运作管理中的决策问题:如工厂选址、超市选址、人员的工作 指派、设备购置和配置等。 1. 整数规划问题的应用意义
其规划模型中往往须引入逻辑变量(即变量仅取 0 或 1 两 个值)来反映冲突因素和抉择。因此,这些问题的规划模型不同于
前述的线性规划范畴,而属于一种新的类型——整数规划。可以毫不
夸张地说,整数规划在实践中有比线性规划更为广泛的应用空间。 2.
纯整数规划:所有决策变量要求取非负整数(这时引进的松弛变量和剩余变量可以不要求取整数)。
全整数规划:除所有决策变量要求取非负整数外,系数aij和常数bi也要求取整数(这时引进的松弛变量和剩余变量也必须是整数)。 混合整数规划:只有一部分的决策变量要求取非负整数,另一部分可以取非负实数。
0-1整数规划:所有决策变量只能取 0 或 1 两个整数。
从数学模型上看整数规划似乎是线性规划的一种特殊形式,求解只需在线性规划的基础上,通过舍入取整,寻求满足整数要求的解即可。
但实际上两者却有很大的不同,通过舍入得到的解(整数)也不一定
就是最优解,有时甚至不能保证所得倒的解是整数可行解。 分枝定界法
分枝定界法(branch and bound)是一种求解非线性整数规划问题的常用算法。这种方法不但可以求解纯整数规划,还可以求解混合整数规划问题。 分枝定界法的步骤如下:
Step 1 放宽或取消原问题的某些约束条件,如求整数解的条件。如果这是求出的最优解是原问题的可行解,那么这个解就是原问题的最优解,计算结束。否则这个解的目标函数值是原问题的最优解的上界(求极大值时)。
Step 2 将放宽了某些约束条件的替代问题分成若干子问题,要求各子问题的解集合的并集要包含原问题的所有可行解,然后对每个子问题求最优解。这些子问题的最优解中 的最优者若是原问题的可行解,则它就是原问题的最优解,计算结束。否则它的目标函数值就是原问题的一个新的上界。另外,各子问题的最优解中,若有为原问题 的可行解的,选这些可行解的最大的目标函数值,它就是原问题最优解的一个下界。
Step 3 对最优解的目标函数值已小于这个下界的问题,其可行解中必无原问题的最优解,可以放弃。对最优解的目标函数值大于这个下界的子问题,都先保留下来,进入Step 4.
Step 4 在保留下的所有子问题中,选出最优解的目标函数值最大的一个,重复Step 1 和Step 2 。如果已经找到该子问题的最优可行解,那么用其目标函数值与前面保留的其他问题在内的所有子问
题的可行解中目标函数值最大者,将它作为新的下界,重复 Step 3 ,直到求出最优解。
1、先不考虑整数约束,解( IP )的松弛问题( LP ),可能得到以下情况之一:
⑴.若( LP )没有可行解,则( IP )也没有可行解,停止计算。 ⑵.若( LP )有最优解,并符合( IP )的整数条件,则( LP )的最优解即为( IP )的最优解,停止计算。
⑶.若( LP )有最优解,但不符合( IP )的整数条件,转入下
一步。为讨论方便,设( LP )的最优解为: ?,b2?,?,br?,?,bm?,0,?,0)T X(0)?(b1
Z.其中bi?(i?1,2,?,m)不全为整数 目标函数最优值为
2、定界:
记( IP )的目标函数最优值为Z* ,以Z(0) 作为Z* 的上界,记为 =Z(0) 。再用观察法找的一个整数可行解 X′,并以其相应的目标函数值 Z′作为Z* 的下界,记为Z= Z′,也可以令Z=-∞,则有: Z ≤ (0)Z* ≤Z
3、分枝:
在( LP )的最优解 X(0)中,任选一个不符合整数条件的变量,例如xr=b’
r (不为整数),以[b’
r ] 表示不超过b’
r 的最大整数。构
造两个约束条件
xr≤ [b’
r ] 和xr≥ [b’
r ] +1
将这两个约束条件分别加入问题( IP ) ,形成两个子问题( IP1)和
( IP2 ) ,再解这两个问题的松弛问题( LP1)和( LP2) 。
4、修改上、下界:按照以下两点规则进行。
⑴.在各分枝问题中,找出目标函数值最大者作为新的上界;
⑵.从已符合整数条件的分枝中,找出目标函数值最大者作为新的下界。
5、比较与剪枝 :
各分枝的目标函数值中,若有小于Z 者,则剪掉此枝,表明此子问题已经探清,不必再分枝了;否则继续分枝。
如此反复进行,直到得到Z=Z*=Z为止,即得最优解 X* 。 线性规划
线性规划简介
线性规划是运筹学中研究较早、发展较快、应用广泛、方法较成熟的一个重要分支,它是辅助人们进行科学管理的一种数学方法.在经济管理、交通运输、工农业生产等经济活动中,提高经济效果是人们不可缺少的要求,而提高经济效果一般通过两种途径:一是技术方面的改进,例如改善生产工艺,使用新设备和新型原材料.二是生产组织与计划的改进,即合理安排人力物力资源.线性规划所研究的是:在一定条件下,合理安排人力物力等资源,使经济效果达到最好.一般地,求线性目标函数在线性约束条件下的最大值或最小值的问题,统称为线性规划问题。满足线性约束条件的解叫做可行解,由所有可行解组成的集合叫做可行域。决策变量、约束条件、目标函数是线性规划的三要素
线性规划问题的数学模型的一般形式
(1)列出约束条件及目标函数
(2)画出约束条件所表示的可行域
(3)在可行域内求目标函数的最优解及最优值
线性规划的模型建立
从实际问题中建立数学模型一般有以下三个步骤;
1.根据影响所要达到目的的因素找到决策变量;
2.由决策变量和所在达到目的之间的函数关系确定目标函数;
3.由决策变量所受的限制条件确定决策变量所要满足的约束条件。 所建立的数学模型具有以下特点:
1、每个模型都有若干个决策变量(x1,x2,x3……,xn),其中n为决策变量个数。决策变量的一组值表示一种方案,同时决策变量一般是非负的。
2、目标函数是决策变量的线性函数,根据具体问题可以是最大化或最小化,二者统称为最优化。
3、约束条件也是决策变量的线性函数。
当我们得到的数学模型的目标函数为线性函数,约束条件为线性等式或不等式时称此数学模型为线性规划模型。
三、解答步骤
模型假设:
1. 所聘一级,二级检验员工作一天以8小时制
2. 聘请的一级,二级检验员分别为x ,y名
3. 工厂应付一级或二级的检验员费用与检验员人数成正比
4. 工厂的错检损失费也分别与一级,二级检验员人数成正比
5. 一级或二级检验员的检验速度与正确率及应付工资成比例 模型构成:
有x名一级检验员,则工厂应付一级检验员每天的工资为
32x
有y名二级检验员,则工厂应付二级检验员每天的工资为
24y
工厂每天因检验员错检损失费为
8x+12y
令工厂每天总检验费用为z 则
z=40x+36y
由于该工厂每天的产量不低于1800件,故有
200x+120y≧1800
可供该厂聘请的一级、二级检验员人数分别为
0≦x≦8 0≦y≦10
因此得到模型
z=40x+36y
200x+120y≧1800
0≦x≦8

min z=40*x1+36*x2 得到c=[40;36]
s.t.
-5*x1-3*x2<=-45 A=[-5 -3]和b=[-45]
x1<=8 推出vlb=[0;0] vub=[8;10]
x2<=10
x1>=0
x2>=0
以上模型没有等式约束,因此Aeq=[],beq=[].
编写M程序如下:
c=[40;36];
A=[-5 -3];
b=[-45];
Aeq=[];
beq=[];
vlb=[0;0];
vub=[8;10];
[x,fval]=linprog(c,A,b,Aeq,beq,vlb,vub)
四、实验过程
建立M文件: M文件是Matlab写程序的文件。MATLAB是解释型语言,就是说MATLAB命令行中敲入的命令在当前MATLAB进程中被解释运行。可每次执行一个任务时敲入长长的命令序列是很烦人的。有两种方法可以使MATLAB的力量得到扩展——脚本和函数。这两种方法都用像emacs一样的文本编辑器中编写的m文件(因为扩展名是.m所以这样命名,m文件还称点m文件)。m文件的好处在于它可以保存命令,还可以轻易地修改命令而无需重新敲入整个命令行。 在模型求解中我们得到式子与解求方法:
式子
z=40x+36y
200x+120y≧1800
0≦x≦8
0≦y≦10
方法
c=[40;36];
A=[-5 -3];
b=[-45];
Aeq=[];
beq=[];
vlb=[0;0];
vub=[8;10];
[x,fval]=linprog(c,A,b,Aeq,beq,vlb,vub)
运行结果
由于人不会半个,所以可得用近取法,则

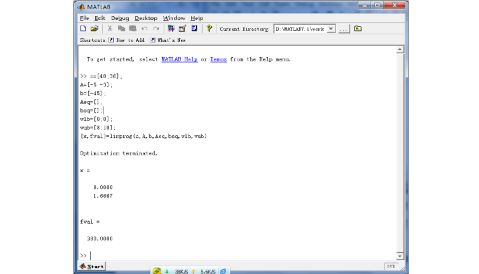
X=8,y=2
五.总结
首先,线性规划是处理线性目标函数和线性约束的一种较为成熟的方法,并且已经广泛应用经济,军事,工业,农业等方面. 为解决现实生活的优化问题提供了有力的工具,例如,在本题中,线性规划解决了工厂如何选择工人的现实问题,为工厂求得了最大利益.
其次,用matlab优化工具箱求解线性规划,使得问题变得简单易求,大大增加了求解的效率.
最后,这次实践也让我们学习到了很多.有些知识是以前没有遇到过的,这需要我们自主解决,自己到图书馆或上网查询资料,增强了我们自己动手的意识,领悟到研究知识的重要性.同时,也让我们了解了团队的力量.
六.参考图书
【1】关于项目选择的整数规划模型分析《华中科技大学学报》20xx年08期 作者:宁艳芳
【2】林志航.计算机辅助质量系统[M].北京:机械工业出版社,1997.137~152.
【3】车阿大,林志航.质量功能展开的多目标规划模型[J].计算机集成制造系统CIMS,1998,4(6):26~30.
【5】《数学建模导论》 作者 陈理荣 北京邮电大学出版社
【6】《数学建模》 作者:陈义华 重庆大学出版社
【7】《数学建模与数学实验》 作者:赵静 但琦 高等教育出版社
【8】《数学建模与数学实验》 作者:刘来福 增文艺 北京师范大学出版社
七.致谢
在实践论文完成之际,我们要特别感谢王凯老师的指导.由于
以前没有经历过类似课程,因此在写论文的过程中我们遇到了很多问题:论文涉及内容,步骤,组成部分等.王凯老师的指导给予了我们很大的帮助,为我们更好的完成论文奠定了良好的基础.在此特别感谢王凯老师.
在这次实践作业中,应用到了很多数学专业知识,如matlab,数学建模等.以前虽然有数学软件这门课程,但是学习的比较简单,没有涉及优化工具箱.因此,这次学习,除了自己查阅有关书籍之外,我们还向数学软件老师请教.有了刘轶中老师的指导,我们遇到的许多专业难题便锋刃而解.
至此,我们团队向以上两位老师表示诚挚的感谢!祝二位老师身体健康,工作顺利!
-
机器人创新实践报告20xx年
让思维沸腾起来让智慧行动起来课程论文智能循迹小车的设计作者姓名李董董学院专业自动化学院自动化1学号20xx30600721指导教师…
-
机器人创新实验报告
机器人创新实验报告在机器人创新实验室我们趁着周六空闲时间从早上900到晚上900顺利结束了机器人创新实验1虽然时间比较紧张但我们从…
-
机器人创新实验报告
机器人创新实验报告本实验内容包括风暴机器人的编程设计和搭建积木机器人两部分前者主要涉及编程控制后者偏重机构的搭建从机械与电子两方面…
-
机器人创新实验报告
西华大学实验报告实验报告理工类课程名称机器人创新实验课程代码6003199学院直属系年级专业班学生姓名学号实验总成绩任课教师开课学…
-
机器人创新实验报告
西华大学实验报告实验报告理工类课程名称课程代码学院直属系年级专业班学生姓名学号实验总成绩任课教师开课学院实验中心名称一设计题目1西…
-
机械创新设计-实验报告模板
机械创新设计方法实验报告班级机械制造五班姓名曾懿学号123004010526指导教师张巍20xx年7月2日实验题目压力抽气式取水器…
-
创新教育实验报告20xx年
创新教育实习报告学院名称专业班级姓名学号指导教师经过我们专业老师的一个星期的努力五天时间虽然不能够完全了解创新教育的本质内涵但是给…
-
机械创新设计实验课程考核报告zlx
机械创新设计课程考核报告机械创新设计实验课程考核报告班级机械1106姓名张雷雪学号20xx6476组内成员张雷雪曹雷考核时间20x…
-
机器人创新实践报告20xx年
让思维沸腾起来让智慧行动起来课程论文智能循迹小车的设计作者姓名李董董学院专业自动化学院自动化1学号20xx30600721指导教师…
-
《移动机器人综合实验》实验报告
移动机器人综合实验姓名学号实验报告朱永超夏齐平周珅宇南京理工大学自动化学院目录实验一ASUII机器人测试2实验二机器人传感器实验7…