篇一 :实验三、控制系统稳定性分析
实验三、控制系统稳定性分析
注意:进入实验室前的要求
学习教材108-182和402-405页内容;
电动机传递函数Gm
KT (KT --转矩系数 La –电感 Ra – 电阻) Las?Ra
机械系统传递函数
d2?d?J2?B?K??T ( J—质量 B—阻尼 K—刚度) dtdt
对其求拉斯变换,得到所要传函。
1.试验目的
1) 学习并掌握Matlab控制系统的简单使用方法
2) 掌握控制系统稳定性分析方法
3) 掌握放大环节(如比例调节器)、延迟环节对控制系统稳定性的影响
2.验仪器系统
安装有matlab软件的计算机实验系统
3.实验内容
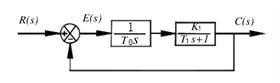
用Bode图分析下面系统中,调节器kc及延迟环节对系统稳定性的影响。(分析调节器kc时,延迟常数=0; 分析延迟常数时,调节器kc=10)
其中Gc(s)为调节器,Gc(s)=k;Gp(s)为功率放大器,Gp(s)=500;Gm(s)为电动机,其电阻r=10欧,电感L=0.1亨,电磁转矩系数Kt =0.01,反电势系数Ke=0.1;H(s)为检测传感器,H(s)=0.1伏/弧度/s;G(s)为被驱动机械对象,可以看成质量-刚度-阻尼系统,J=0.5;
…… …… 余下全文
篇二 :自动控制实验报告一-控制系统的稳定性分析
实验一 控制系统的稳定性分析
一、实验目的
1.观察系统的不稳定现象。
2.研究系统开环增益和时间常数对稳定性的影响。
二、实验仪器
1.自动控制系统实验箱一台
2.计算机一台
三、实验内容
系统模拟电路图如图
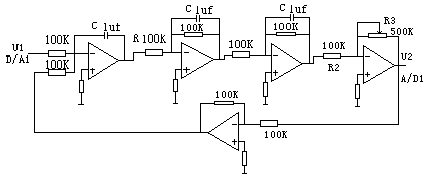
系统模拟电路图
其开环传递函数为:
G(s)=10K/s(0.1s+1)(Ts+1)
…… …… 余下全文
篇四 :自动控制原理实验报告--控制系统的稳定性和稳态误差
课程名称:
实验项目:
实验地点:
专业班级:
学生姓名:
指导教师: 本科实验报告 自动控制原理 控制系统的稳定性和稳态误差 多学科楼机房 学号:
2012 年 5 月 15 日

一、实验目的和要求:
1.学会利用MATLAB对控制系统的稳定性进行分析;
2.学会利用MATLAB计算系统的稳态误差。
二、实验内容和原理:
1.利用MATLAB描述系统数学模型
如果系统的的数学模型可用如下的传递函数表示
G(s)?Y(s)
U(s)?b0s
snm?b1s?a1sm?1???bmn?1???an
则在MATLAB下,传递函数可以方便的由其分子和分母多项式系数所构成的两个向量惟一确定出来。即
num=[b0,b1 ,…, bm]; den=[1,a1,a2 ,…,an]
例2-1 若系统的传递函数为
4G(s)?3 2s?3s?2s?5
试利用MATLAB表示。
当传递函数的分子或分母由若干个多项式乘积表示时,它可由MATLAB 提供的多项式乘法运算函数conv( )来处理,以获得分子和分母多项式向量,此函数的调用格式为 p=conv(p1,p2)
…… …… 余下全文
篇五 :实验三 控制系统稳定性分析
实验三 控制系统稳定性分析
实验日期:必填 实验项目:必填 实验指导老师:孙歆钰(必填)
一、 实验目的:
通过观察典型三阶线性系统,分析线性系统各参数对系统稳定性的影响。
二、 实验内容
完成三阶系统稳定性能的测试。
三、 实验仪器
1. 自动控制原理实验箱
2. 示波器
3. 数字万用表
四、 实验原理
…… …… 余下全文
篇七 :控制实验报告二典型系统动态性能和稳定性分析
实验报告2
报告名称:典型系统动态性能和稳定性分析
一、实验目的
1、学习和掌握动态性能指标的测试方法。
2、研究典型系统参数对系统动态性能和稳定性的影响。
二、实验内容
1、观测二阶系统的阶跃响应,测出其超调量和调节时间,并研究其参数变化对动态性能和稳定性的影响。
2、观测三阶系统的阶跃响应,测出其超调量和调节时间,并研究其参数变化对动态性能和稳定性的影响。
三、实验过程及分析
1、典型二阶系统
结构图以及电路连接图如下所示:
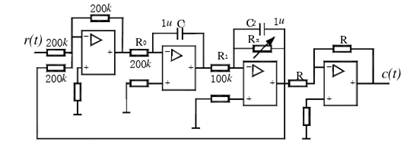
对电路连接图分析可以得到相关参数的表达式:
 ;
; ;
; ;
;
根据所连接的电路图的元件参数可以得到其闭环传递函数为
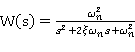 ;其中
;其中 ;
;
因此,调整Rx的阻值,能够调节闭环传递函数中的阻尼系数,调节系统性能。
当 时,为过阻尼系统,系统对阶跃响应不超调,响应速度慢,因此有如下的实验曲线。
时,为过阻尼系统,系统对阶跃响应不超调,响应速度慢,因此有如下的实验曲线。

当 时,为临界阻尼系统,系统对阶跃响应恰好不超调,在不发生超调的情况下有最快的响应速度,因此有如下的实验曲线。对比上下两张图片,可以发现系统最后的稳态误差都比较明显,应该与实验仪器的精密度有关。同时我们还观察了这个系统对斜坡输入的响应,其特点是输出曲线转折处之后有轻微的上凸的部分,最后输出十分接近输入。
时,为临界阻尼系统,系统对阶跃响应恰好不超调,在不发生超调的情况下有最快的响应速度,因此有如下的实验曲线。对比上下两张图片,可以发现系统最后的稳态误差都比较明显,应该与实验仪器的精密度有关。同时我们还观察了这个系统对斜坡输入的响应,其特点是输出曲线转折处之后有轻微的上凸的部分,最后输出十分接近输入。
…… …… 余下全文
篇八 :3. 实验三 控制系统的稳定性分析
实验三控制系统的稳定性分析
一、 实验目的:
1. 观察系统的不稳定现象。
2. 研究系统开环增益和时间常数对稳定性的影响
3. 学习用MATLAB仿真软件对实验内容中的电路进行仿真。
二、 实验原理
线性系统工作在平衡状态,受到扰动偏离了平衡状态,扰动消失之后,系统又能恢复到平衡状态,称系统是稳定的。稳定性是系统的固有特性,是扰动消失后系统自身的恢复能力。稳定性只由结构、参数决定,与初始条件及外作用无关。
不稳定的系统是无法正常工作的。稳定性是系统正常工作的首要条件。因此,分析系统的稳定性,确定使系统稳定工作的条件是研究设计控制系统的重要内容。
稳定判据则只要根据特征方程的系数便可判别出特征根是否具有负实部,从而判断出系统是否闭环稳定。系统闭环稳定的充分必要条件是:特征方程各项系数均大于零。
三、 实验步骤
1. 双击图标【matlab】行软件。
2. 在【simulink】模块中建立系统仿真模型并运行。
3. 设置输入信号的【属性对话框】。例:【step values】阶跃值=1000。
…… …… 余下全文