自动控制原理实验报告--控制系统的稳定性和稳态误差
课程名称:
实验项目:
实验地点:
专业班级:
学生姓名:
指导教师: 本科实验报告 自动控制原理 控制系统的稳定性和稳态误差 多学科楼机房 学号:
2012 年 5 月 15 日

一、实验目的和要求:
1.学会利用MATLAB对控制系统的稳定性进行分析;
2.学会利用MATLAB计算系统的稳态误差。
二、实验内容和原理:
1.利用MATLAB描述系统数学模型
如果系统的的数学模型可用如下的传递函数表示
G(s)?Y(s)
U(s)?b0s
snm?b1s?a1sm?1???bmn?1???an
则在MATLAB下,传递函数可以方便的由其分子和分母多项式系数所构成的两个向量惟一确定出来。即
num=[b0,b1 ,…, bm]; den=[1,a1,a2 ,…,an]
例2-1 若系统的传递函数为
4G(s)?3 2s?3s?2s?5
试利用MATLAB表示。
当传递函数的分子或分母由若干个多项式乘积表示时,它可由MATLAB 提供的多项式乘法运算函数conv( )来处理,以获得分子和分母多项式向量,此函数的调用格式为 p=conv(p1,p2)
其中,p1和p2分别为由两个多项式系数构成的向量,而p为p1和p2多项式的乘积多项式系数向量。conv( )函数的调用是允许多级嵌套的。
例2-2 若系统的传递函数为
G(s)?4(s?6s?6)
s(s?1)(s?3s?2s?5)322
试利用MATLAB求出其用分子和分母多项式表示的传递函数。
2.利用MATLAB分析系统的稳定性
在分析控制系统时,首先遇到的问题就是系统的稳定性。判断一个线性系统稳定性的一种最有效的方法是直接求出系统所有的极点,然后根据极点的分布情况来确定系统的稳定性。对线性系统来说,如果一个连续系统的所有极点都位于左半s平面,则该系统是稳定的。 MATLAB中根据特征多项式求特征根的函数为roots( ),其调用格式为
r=roots(p)
其中,p为特征多项式的系数向量;r为特征多项式的根。
另外,MATLAB中的pzmap( )函数可绘制系统的零极点图,其调用格式为
[p,z]=pzmap(num,den)
其中,num和den分别为系统传递函数的分子和分母多项式的系数按降幂排列构成的系数行向量。
当pzmap( )函数不带输出变量时,可在当前图形窗口中绘制出系统的零极点图;当带有输出变量时,也可得到零极点位置,如需要可通过pzmap(p,z)绘制出零极点图,图中的极点用“×”表示,零点用“o”表示。
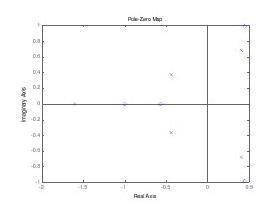
例2-3 已知系统的传递函数为
GB(s)?Y(s)R(s)?3s?2s?s?4s?2
3s?5s?s?2s?2s?15432432

给出系统的零极点图,并判定系统的稳定性。
由以上结果可知,系统在右半s平面有两个极点,故系统不稳定。
3.利用MATLAB计算系统的稳态误差
对于图2-2所示的反馈控制系统,根据误差的输入端定义,利用拉氏变换终值定理可得稳态误差ess
1
ess?limsE(s)?lims[R(s)?B(s)]?limsR(s)?limEs(s)
s?0s?0s?0s?01?G(s)H(s)
在MATLAB中,利用函数dcgain( )可求取系统在给定输入下的稳态误差,其调用格式为
ess=dcgain (nume,dene)
其中,ess为系统的给定稳态误差;nume和dene分别为系统在给定输入下的稳态传递函数Es(s)的分子和分母多项式的 系数按降幂排列构成的系数行向量
例2-4 已知单位反馈系统的开环传递函数为
2
s?2s?1
试求该系统在单位阶跃和单位速度信号作用下的稳态误差。
解 系统在单位阶跃和单位速度信号作用下的稳态传递函数分别为
s?2s?11s?2s?1
Es1(s)?sR(s)?s2??2
1?G(s)H(s)s?2s?2ss?2s?2Es2(s)?s
11?G(s)H(s)
R(s)?s
s?2s?1
22
G(s)H(s)?
1
1
22
s?2s?2s
?
1
2
?
s?2s?1s?2s?2s
3
2
2
三、主要仪器设备:
安装Windows系统和MATLAB软件的计算机一台。
四、实验数据记录和处理(实验程序):
(1)例2-1程序:
>>num=4;den=[1,3,2,5];printsys(num,den)
结果显示:
num/den =
4
---------------------------- s^3 + 3 s^2 + 2 s+5
(2)例2-2程序:
>>num=4*[1,6,6];den=conv([1,0],conv([1 1],[1,3,2,5]));printsys(num,den) 结果显示:
num/den =
4 s^2 + 24 s + 24
------------------------------------------ s^5 + 4 s^4 + 5 s^3 + 7 s^2 + 5 s
(3)例2-3程序:
>>num=[3 2 1 4 2];den=[3 5 1 2 2 1]; >>r=roots(den),pzmap(num,den)
执行结果可得以下极点和如图2-1所示的零极点图。 r =
-1.6067 0.4103 + 0.6801i 0.4103 - 0.6801i -0.4403 + 0.3673i -0.4403 - 0.3673i (4)例2-4程序:
>>nume1=[1 2 1];dene1=[1 2 2];ess1=dcgain (nume1,dene1)
>>nume2=[1 2 1];dene2=[1 0];ess2=dcgain (nume2,dene2)
执行后可得以下结果。 ess1 =
0.5000 ess2 = Inf
2
2
五、讨论、心得:
通过本实验,让我回顾了matlab的使用,也增长了我对该程序编写的能力,对于控
制系统的稳定性和稳态误差也有了更加深刻的理解。
第二篇:计算机控制实验报告
计算机控制实验报告
班级: 姓名: 学号:
实验二 最少拍控制系统
1.实验结果
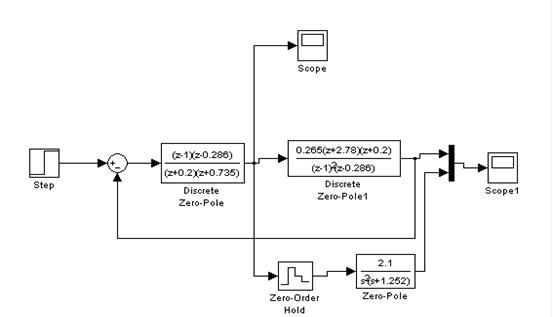
图2-1 单位阶跃输入下最少拍有纹波控制系统仿真结构模型
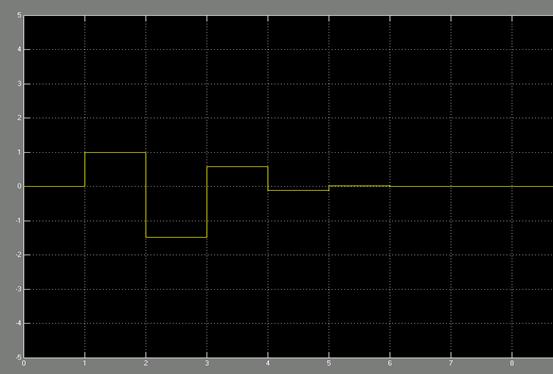
图2-2 单位阶跃输入下最少拍有纹波控制器输出
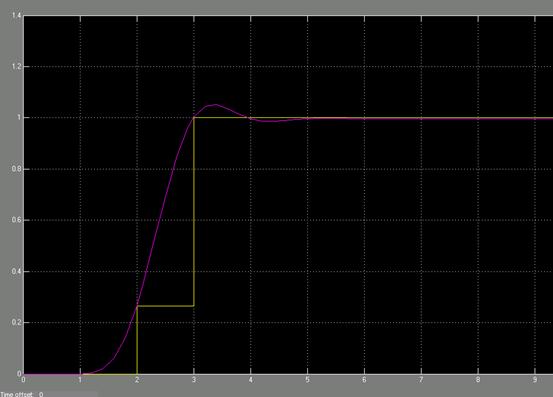
图2-3单位阶跃输入下最少拍有纹波系统输出
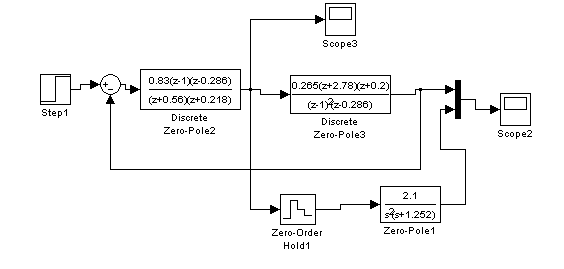
图2-4 单位阶跃输入下最少拍无纹波控制系统仿真结构模型
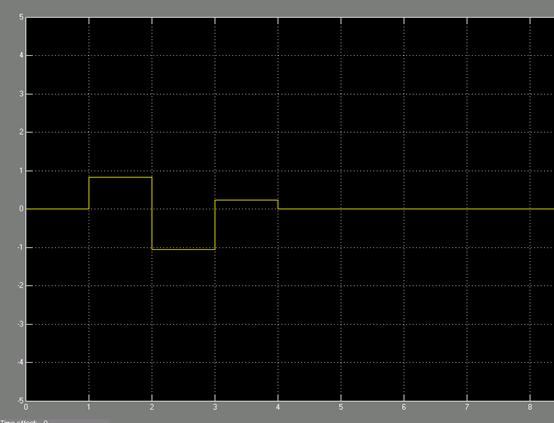
图2-5单位阶跃输入下最少拍无纹波控制器输出
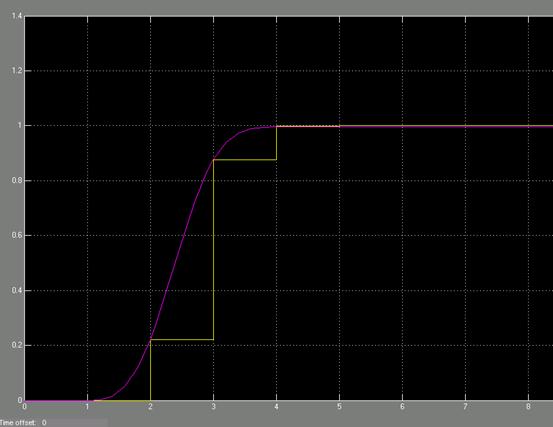
图2-6 单位阶跃输入下最少拍无纹波系统输出
2. 思考与分析
(1)最少拍受什么限制而使调整节拍增加?
答:设计出来的最少拍控制系统,在有限拍后进入稳态,只保证了在最少的几个采样周期后系统的响应在采样点时是稳态误差为零,而不能保证在任意两个采样点之间的稳态误差为零,即最少拍控制系统在采样时间精确的跟踪输入信号。所以最少拍受输入函数阶数的限制而使调整节拍增加,即输入函数的阶数越高,调解时间越长。
(2)无纹波系统对控制器有何要求?
答:最少拍无波纹对控制器有如下约束条件:
1. 被控对象G(S)有足够的积分环节。若输入为速度输入函数,被控对象G(s)的稳态输出也应为速度函数,因此就要求G(s)中至少有一个积分环节。若输入为加速度输入函数,则被控对象G(s)的稳态输出也应为加速度函数,要求G(s)中至少有两个积分环节。所以最少拍无纹波控制能够实现的条件是被控对象G(S)有足够的积分环节。
2. 必须包含G(z)中的圆外圆内全部零点N(z)。
必须包含G(z)中的圆外圆内全部零点N(z)。
(3)分析不同输入信号对最小拍控制系统的影响。
答:在单位阶跃函数作用下,输出响应经过一个采样周期T,输出与输入完全跟踪,即调整时间为一拍。同理在单位速度作用下经过两个采样周期T,输出与输入完全跟踪,即调整时间为二拍 。在单位加速度作用下经过三个采样周期T,输出与输入完全跟踪,即调整时间为三拍。即输入函数的阶数越高,调整时间越长。
实验三 纯滞后控制实验
1.实验结果
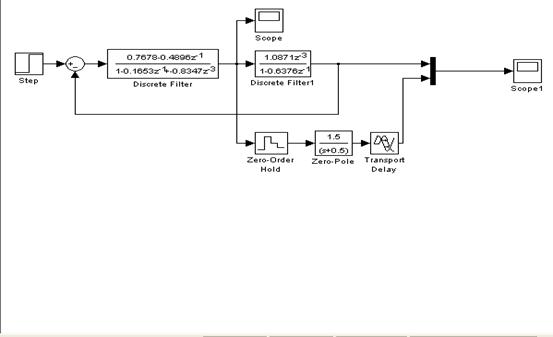
图3-1纯滞后控制系统仿真结构模型

图3-2 纯滞后系统控制器输出
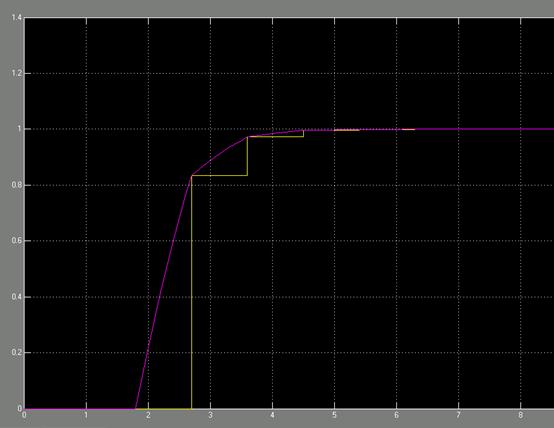
图3-3 纯滞后控制系统输出
2. 思考与分析
(1)纯滞后控制系统对阶跃信号有无超调?为什么?
答:纯滞后控制系统对阶跃信号有超调。因为被控对象中的纯滞后部分 仅将控制作用在时间坐标上推移了一个时间
仅将控制作用在时间坐标上推移了一个时间 ,被控对象具有纯滞后特性,时间常数很大,而被控对象的滞后时间会使系统的稳定性降低,动态性能变坏,即会引起超调和持续的振荡,因而纯滞后控制系统对阶跃信号也有一定的超调。
,被控对象具有纯滞后特性,时间常数很大,而被控对象的滞后时间会使系统的稳定性降低,动态性能变坏,即会引起超调和持续的振荡,因而纯滞后控制系统对阶跃信号也有一定的超调。
(2)纯滞后控制与PID控制有什么本质区别?
答:1.纯滞后控制:由于对象存在较大的纯滞后,采用单回路PID控制效果不佳。但常规单回路PID控制对一般对象控制效果较为理想,是生产过程中常用的一种控制方法。2.PID控制:比例控制能迅速反应误差,从而减小稳态误差。但是,比例控制不能消除稳态误差。比例放大系数的加大,会引起系统的不稳定。积分控制,只要系统有误差存在,积分控制器就不断地积累,输出控制量,以消除误差。但是积分作用太强会使系统超调加大,甚至使系统出现振荡。微分控制可以减小超调量,克服振荡,使系统的稳定性提高,同时加快系统的动态响应速度,减小调整时间,从而改善系统的动态性能。应用PID控制,必须适当地调整比例放大系数KP,积分时间TI和微分时间TD,使整个控制系统得到良好的性能。纯滞后控制部分的达林算法是基于离散系统的设计方法,按照期望的传递性能设计控制器达到改善性能的目的,PID控制算法是基于连续系统的设计方法。
-
实验三、控制系统稳定性分析
实验三控制系统稳定性分析注意进入实验室前的要求学习教材108182和402405页内容电动机传递函数GmKTKT转矩系数La电感R…
-
自动控制实验报告一-控制系统的稳定性分析
实验一控制系统的稳定性分析一实验目的1观察系统的不稳定现象2研究系统开环增益和时间常数对稳定性的影响二实验仪器1自动控制系统实验箱…
-
实验一 控制系统的稳定性分析
实验一控制系统的稳定性分班级光伏姓名王永强学号2班120xx09067实验一控制系统的稳定性分析一实验目的1研究高阶系统的稳定性验…
-
自动控制原理实验报告--控制系统的稳定性和稳态误差
课程名称实验项目实验地点专业班级学生姓名指导教师本科实验报告自动控制原理控制系统的稳定性和稳态误差多学科楼机房学号20xx年5月1…
-
实验三 控制系统稳定性分析
实验三控制系统稳定性分析实验日期必填实验项目必填实验指导老师孙歆钰必填一实验目的通过观察典型三阶线性系统分析线性系统各参数对系统稳…
-
自控实验报告2-时域系统分析和线性系统的稳定性研究
实验2时域系统分析和线性系统的稳定性研究1研究性教学目的学习二阶系统阶跃响应曲线的实验测试方法研究二阶系统的两个重要参数n对阶跃瞬…
-
实验三 系统稳定性的研究的实验报告-何永强
系统稳定性的研究的实验报告学院机械工程学院班级09级过控2班姓名周军学号120xx240361实验三系统稳定性的研究一目的要求1验…
-
自动控制实验报告一-控制系统的稳定性分析
实验一控制系统的稳定性分析一实验目的1观察系统的不稳定现象2研究系统开环增益和时间常数对稳定性的影响二实验仪器1自动控制系统实验箱…
-
实验一 控制系统的稳定性分析
实验一控制系统的稳定性分班级光伏2班姓名王永强学号120xx09067实验一控制系统的稳定性分析一实验目的1研究高阶系统的稳定性验…
-
实验5 线性系统的稳定性和稳态误差分析
实验五自动控制系统的稳定性和稳态误差分析一实验目的1研究高阶系统的稳定性验证稳定判据的正确性2了解系统增益变化对系统稳定性的影响3…
-
过程控制系统专题实验报告_孙鸿
XIANJIAOTONGUNIVERSITY过程控制系统专题实验实验报告姓名孙鸿班级自动化03学号10054070同组者无一实验名…