自动控制实验报告
一 典型系统的时域响应和稳定性分析
一、 实验目的
1.研究二阶系统的特征参量(ξ、ωn)对过渡过程的影响。
2.研究二阶对象的三种阻尼比下的响应曲线及系统的稳定性。
3.熟悉Routh判据,用Routh判据对三阶系统进行稳定性分析。
二、实验原理及内容
1.典型的二阶系统稳定性分析
(1) 结构框图:见图1
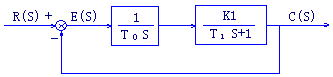
图1
(2) 对应的模拟电路图
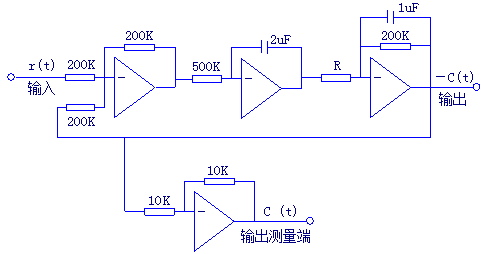
图2
(3) 理论分析
导出系统开环传递函数,开环增益。
系统开环传递函数为:G(S) = =
开环增益为:K=K1/K0
(4) 实验内容
先算出临界阻尼、欠阻尼、过阻尼时电阻R的理论值,再将理论值应用于模拟电路中,观察二阶系统的动态性能及稳定性,应与理论分析基本吻合。在此实验中(图2),
 ,
,  ,
,

系统闭环传递函数为:
其中自然振荡角频率: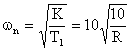
 ;阻尼比:
;阻尼比: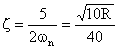
2.典型的三阶系统稳定性分析
(1) 结构框图
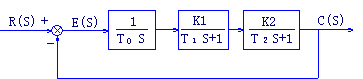
图3
(2) 模拟电路图
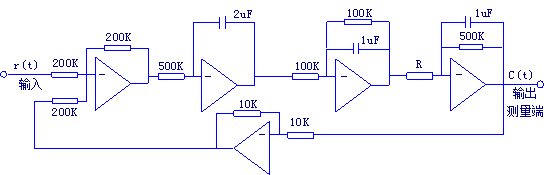
图4
(3)理论分析
系统的开环传函为: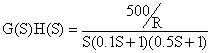 (其中
(其中 ),
),
系统的特征方程为: 。
。
(4)实验内容
从Routh判据出发,为了保证系统稳定,K和R如何取值,可使系统稳定,系统临界稳定,系统不稳定
三、 实验现象分析
1.典型二阶系统瞬态性能指标
表1
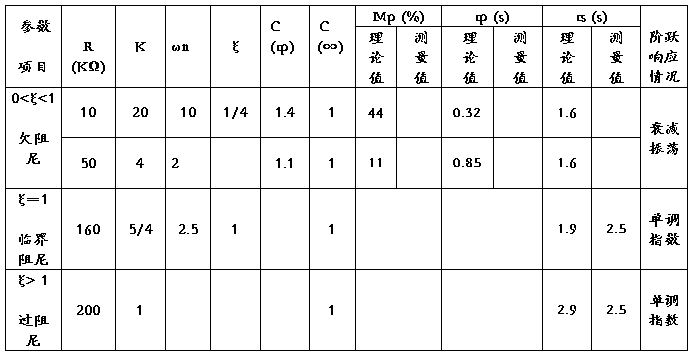
其中 ,
, ,
, ,
,
2.典型三阶系统在不同开环增益下的响应情况
表2

由Routh判据得:
S3 1 20
S2 12 20K
S1 0
S0 20K 0
要使系统稳定则第一列应均为正数,所以得
得 0<K<12即R>41.7KΩ时,系统稳定
K=12 即R=41.7KΩ时,系统临界稳定
K>12即R<41.7KΩ时,系统不稳定
二 线性系统的根轨迹分析
1. 绘制图3系统的根轨迹
由开环传递函数分母多项式得最高次为3,所以根轨迹条数为3。同时开环极点为p1 = 0,p2 = -1,p3 = -2.
先判断实轴上的根轨迹,一条起始于-2,终止于无穷远。起始于0、-1的两条根轨迹在实轴上相遇后分离, 由1.5得,排除S2,则S=-0.422为根轨迹分离点,带入特征方程得 K = 0.19
然后求根轨迹与虚轴的交点,将S=Jw代入特征方程得
得K = 3,W= +
由以上可以画出根轨迹图

2. 根据根轨迹图分析系统的稳定性
K由0增大到无穷时,
0<K<3即R>166KΩ时,根轨迹在左半平面,系统稳定
K=3即R=166KΩ时,闭环极点为一对虚根,临界稳定
K>3即R<166KΩ时,根轨迹进入右半平面,系统不稳定
3. 如何通过改造根轨迹来改善系统的品质?.
可以通过增加开环零极点改善系统性能。增加开环零点有利于改善系统的动态性能,而增加开环极点不利于改善系统的动态性能,会使根轨迹曲线右移。
三 线性系统的频率响应分析
1. 绘制图1. 图3系统的奈氏图和伯德图
利用matlab画图
图3系统,取K = 50
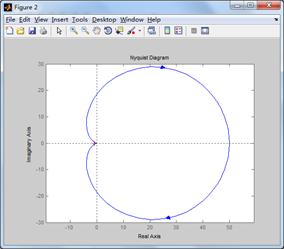
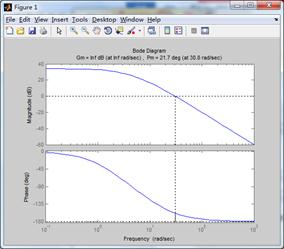
图1系统,取K=10
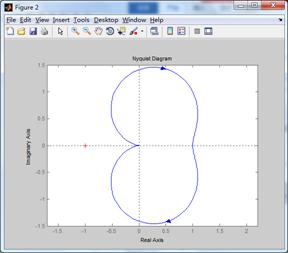
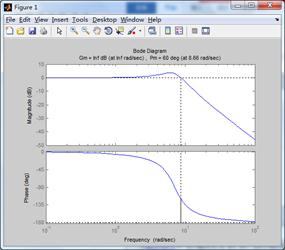
2. 根据奈氏图和伯德图分析系统的稳定性,并讨论其频域稳定裕度
根据奈氏图判定系统稳定性,主要看曲线是否绕过(-1,j0),若曲线不包围这一点,则闭环系统稳定,若曲线穿过这一点,则系统处于临界稳定状态。利用伯德图来分析系统稳定性及求取稳定裕量。若截止频率小于180?时对应的频率,则系统稳定。其频域稳定裕度分相角和幅值裕度,可分别在奈氏图和伯德图上求取,表明了系统在相角、幅值方面的稳定储备量,不致系统因参数的小范围漂移而导致系统性能变差以致不稳定。
第二篇:自动控制理论实验报告1

Harbin Institute of Technology
实验报告
姓名: 学号:
课程名称:
实验名称:
实验序号: 实验日期:
实验室名称:
同组人:
实验成绩: 总成绩:
教师评语:
教师签字:
年 月 日
典型环节的时域响应与典型系统瞬态响应和稳定性
一. 实验目的
1. 掌握典型环节模拟电路的构成方法、传函及输出时域函数的表达式。
2. 掌握各典型环节特征参数的测量方法。
3. 熟悉各种典型环节的阶跃响应曲线。
4. 研究二阶系统的特征参量( )对过渡过程的影响。
)对过渡过程的影响。
5. 研究二阶对象的三种阻尼比下的响应曲线及系统的稳定性。
二. 实验设备、
PC机一台,TD-ACC+教学实验系统一套。
三. 实验原理及内容
1.比例环节
比列环节的传递函数为 .
.
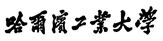
(1).R0=200k,R1=100k时,对应的阶跃响应曲线如图1
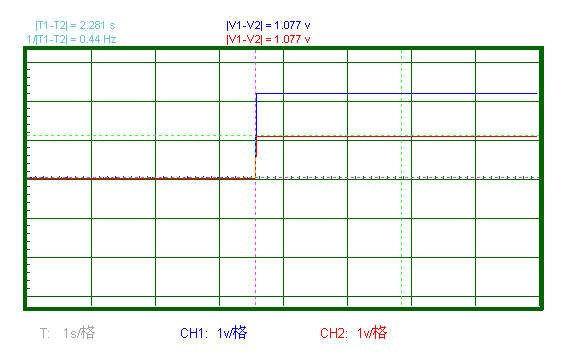
图1
(注:图中CH1为输入信号,CH2为输出信号,以下各图均相同)
输入信号幅值为V1=2.179V,输出信号幅值为V2=1.077V;理论上,传递函数 ,实际测得的K=
,实际测得的K= ,理论值基本等于实际测量值。
,理论值基本等于实际测量值。
(2)R0=200k,R1=200k,对应的阶跃响应曲线如图2所示
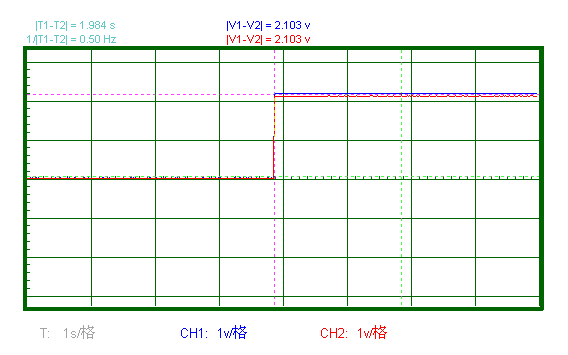
图2
输入信号幅值为V1=2.179V,输出信号幅值为V2=2.103V。理论上,传递函数 ,实际测得的K=
,实际测得的K= ,理论值基本等于实际测量值。
,理论值基本等于实际测量值。
两次实验中,R0=200k保持不变,当R1从100k变为200k后,比例常数变为原来的两倍,反映在阶跃响应曲线上,则为:R1=100k时,输入信号高于输出信号,幅值约为输出信号的两倍;R1=200k时,输入信号和输出信号的曲线基本重合。
2.积分环节
积分环节的传递函数为 。
。
(1)  对应的阶跃响应曲线如图3所示
对应的阶跃响应曲线如图3所示

图3
输入信号的幅值V1=2.179V,输出信号的幅值V2=9.230V。理论上,积分时间常数 =200ms,实际测得的积分时间常数为T=196.9ms.实际值基本等于理论值。
=200ms,实际测得的积分时间常数为T=196.9ms.实际值基本等于理论值。
(2). 对应的阶跃响应曲线如图4所示
对应的阶跃响应曲线如图4所示
图4
输入信号的幅值为V1=2.179v 输出信号的幅值为V2=9.230v。理论上,积分时间常数 =100ms,实际测得的积分时间常数为T=103.1ms.实际值基本等于理论值。
=100ms,实际测得的积分时间常数为T=103.1ms.实际值基本等于理论值。
选择不同的  时,对应的积分时间常数不一样。较大时,阶跃响应随时间变化的较慢,对应的阶跃响应曲线较平缓;较小时,阶跃响应随时间变化的较快,对应的阶跃响应曲线较为陡峭。
时,对应的积分时间常数不一样。较大时,阶跃响应随时间变化的较慢,对应的阶跃响应曲线较平缓;较小时,阶跃响应随时间变化的较快,对应的阶跃响应曲线较为陡峭。
3.比例积分环节
比例积分环节的传递函数为 。
。
(1).
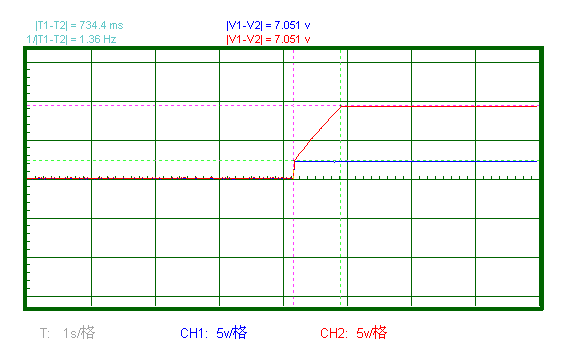
图5
输入信号的幅值V1=2.79V,输出信号的幅值V2=9.230V。理论上,积分时间常数T= 实际测得的总得相响应时间为734.4ms.
实际测得的总得相响应时间为734.4ms.
(2).
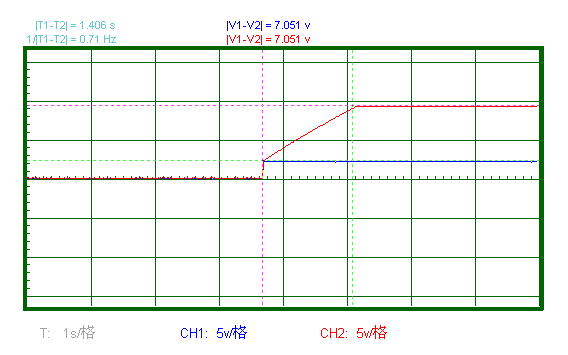
图6
输入信号幅值为V1=2.179V,输出信号幅值为V2=9.230V。理论上,积分时间常数T= 实际测得的总得相响应时间为1.406s。
实际测得的总得相响应时间为1.406s。
 不变,C增大时,响应时间变长,对应阶跃响应曲线上升阶段变得更慢、更平缓。
不变,C增大时,响应时间变长,对应阶跃响应曲线上升阶段变得更慢、更平缓。
6. 惯性环节
惯性环节的传递函数为 ,其中K=
,其中K= ,T=
,T= 。
。
(1)  对应的阶跃响应曲线如图7所示
对应的阶跃响应曲线如图7所示
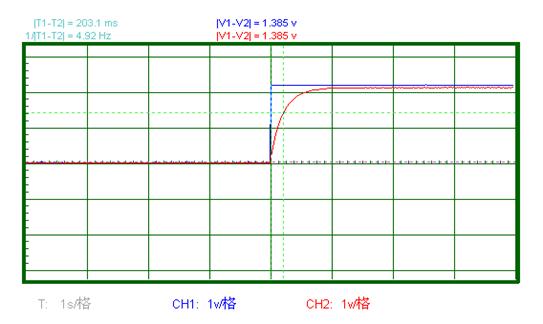
图7
输入信号的幅值为V1=2.179V,输出信号的幅值为V2=2.179V。理论上,惯性时间常数为T= ,实际测得的惯性时间常数T=203.1ms,理论值基本等于实际测得的值。
,实际测得的惯性时间常数T=203.1ms,理论值基本等于实际测得的值。
(2). C=2u时,阶跃响应曲线如图8所示
C=2u时,阶跃响应曲线如图8所示
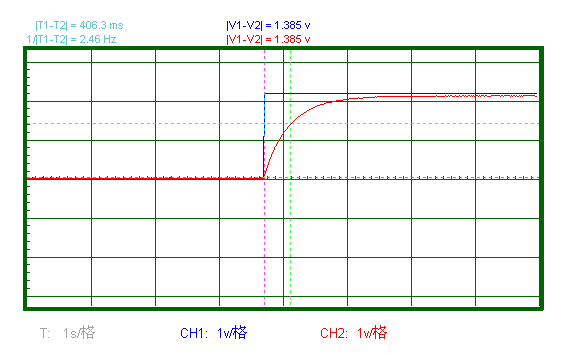
图8
输入信号的幅值为V1=2.179V,输出信号的幅值V2=2.179V。理论上,惯性时间常数为T= ,实际测得的惯性时间常数T=406.3ms,理论值基本等于实际测得的值。
,实际测得的惯性时间常数T=406.3ms,理论值基本等于实际测得的值。
不变,C增大时,响应时间变长,对应的阶跃响应曲线变得平缓,上升变慢。
7. 典型二阶系统
典型二阶系统的开环传递函数为 .此实验中,
.此实验中, K=
K= =
= 。系统的闭环传递函数为W(S)=
。系统的闭环传递函数为W(S)= 。其中,自然振荡角频率
。其中,自然振荡角频率 ,阻尼比
,阻尼比 。令
。令 ,可求得临界阻尼时,R=40k,则R<40k时,系统处于欠阻尼状态,R>40k时系统处于过阻尼状态。
,可求得临界阻尼时,R=40k,则R<40k时,系统处于欠阻尼状态,R>40k时系统处于过阻尼状态。
(1) R=40k,系统处于临界阻尼状态,阶跃响应曲线如图9所示

图9
输入信号幅值为2.179V,输出信号稳态幅值为2.179V。由响应曲线求得,上升时间 ,调整时间
,调整时间 .最大超调量Mp%=0.理论进行计算,上升时间
.最大超调量Mp%=0.理论进行计算,上升时间 ,R=40K时,系统处于临界阻尼状态,
,R=40K时,系统处于临界阻尼状态, 理论上,上升时间应该为无穷大,但实际上经过时间常数的3倍时,误差就成为5%了。最大超调量Mp%理论上为0,实际测得也为0.
理论上,上升时间应该为无穷大,但实际上经过时间常数的3倍时,误差就成为5%了。最大超调量Mp%理论上为0,实际测得也为0.
(2) R<40k时,系统处于欠阻尼状态,取R=9.77k,其阶跃响应曲线如图10所示

图10
输入信号幅值为V1=2.179V,输出信号稳态值为V2=2.179V,峰值时间 ,上升时间
,上升时间 调节时间
调节时间 ,最大超调量Mp%=100*(0.3333/2.179)%=15.3%.理论上进行计算。上升时间为,R=9.77K时,
,最大超调量Mp%=100*(0.3333/2.179)%=15.3%.理论上进行计算。上升时间为,R=9.77K时, 可得
可得 ,
, =8.82,则
=8.82,则 .峰值时间
.峰值时间 =356ms,调节时间
=356ms,调节时间 =1891ms,最大超调量Mp%=17.1%。上升时间
=1891ms,最大超调量Mp%=17.1%。上升时间 、峰值时间
、峰值时间 和最大超调量Mp%实验测得的值基本等于于理论计算值,调节时间
和最大超调量Mp%实验测得的值基本等于于理论计算值,调节时间 实验测得的值和理论计算值相差较大,可能由于操作不当以及肉眼观察导等致误差较大。
实验测得的值和理论计算值相差较大,可能由于操作不当以及肉眼观察导等致误差较大。
(3)R>40k时,系统处于过阻尼状态,取R=72.82k,其阶跃响应曲线如图11所示
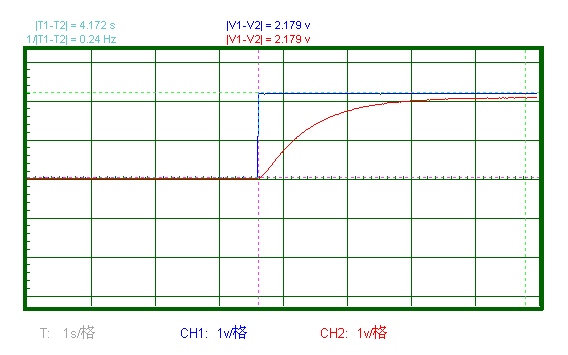
图11
输入信号幅值为V1=2.179V,输出信号稳态值为V2=2.179V,上升时间 ,调整时间
,调整时间 . 最大超调量Mp%=0. 理论上,上升时间应该为无穷大,但实际上经过时间常数的3倍时,误差就成为5%了。最大超调量Mp%理论上为0,实际测得也为0.
. 最大超调量Mp%=0. 理论上,上升时间应该为无穷大,但实际上经过时间常数的3倍时,误差就成为5%了。最大超调量Mp%理论上为0,实际测得也为0.
四. 思考题
1. 由运算放大器组成的各种环节的传递函数是在什么条件下推导出的?
答:将运算放大器视为理想运放,忽略了一些极小的参数影响,如晶体管的极间电容等。
2. 实验电路中串联的后一个运算放大器的作用?若没有,则其传递函数有什么差别?
答:倒相的作用;如果没有这个运算放大器,则传递函数前多一个负号。
3. 惯性环节在什么条件下可近似为比例环节?而在什么条件下可近似为积分环节?
答:惯性环节的传递函数为 ,当T>>1时,TS+1近似为TS,则传函近似为
,当T>>1时,TS+1近似为TS,则传函近似为 ,即为积分环节;当T<<1时,TS+1近似为1,则传函近似为
,即为积分环节;当T<<1时,TS+1近似为1,则传函近似为 ,即为比例环节。
,即为比例环节。
-
自动控制实验报告
一典型系统的时域响应和稳定性分析一实验目的1研究二阶系统的特征参量n对过渡过程的影响2研究二阶对象的三种阻尼比下的响应曲线及系统的…
-
PLC自动门控制装置设计实验报告 [当文网提供](1)
PLC自动门控制装置设计目录1目录12自动门控制装置设计221设计题目222设计目的23设计任务231自动门控制装置的硬件组成33…
-
北科大自动化专选——智能控制理论实验报告
智能控制理论基础实验报告学院专业班级姓名学号实验一采用SIMULINK的系统仿真一实验目的及要求1熟悉SIMULINK工作环境及特…
-
PLC四层电梯自动控制系统课程设计报告 欧姆龙 武汉工程大学版
PLC课程设计报告题目四层电梯自动控制系统专业班级学号学生姓名指导教师学院名称电气信息学院完成日期年月摘要可编程序控制器是微机技术…
-
自动控制理论实验报告
订装实验报告系姓名预定时间实验名称典型环节的时域响应信息院侯婷婷20xx41专业学号实验时间自动化090912122720xx41…
-
自动控制理论实验报告
实验二控制系统的时域分析一实验目的学习利用MATLAB进行控制系统时域分析包括典型响应判断系统稳定性和分析系统的动态特性二实验要点…
-
自动控制原理实验报告
信控学院上机实验实验报告课程自动控制原理实验日期年月日专业班级测控1201班姓名XXXX学号XXXXX同组人实验名称系统的能控性与…
-
自动控制理论实验报告
订装实验报告系姓名预定时间实验名称典型环节的时域响应信息院侯婷婷20xx41专业学号实验时间自动化090912122720xx41…
-
自动控制原理实验报告(北化)
实验四传递函数的零极点对系统过渡过程的影响一实验目的1研究传递函数的零极点对系统过渡过程的影响2研究高阶系统的闭环主导极点的性质三…
-
自动控制实验报告三-控制系统的稳定性分析
实验三控制系统的稳定性分析一实验目的1观察系统的不稳定现象2研究系统开环增益和时间常数对稳定性的影响二实验仪器1ELATIII型自…
- 自动绕线机实验报告_控制流程图